光的干涉现象是光学精密检测的重要基础;上世纪初,迈克尔逊-莫雷实验曾以精确的测量结果否定了以太的存在,为相对论提供了实验证据,其测量技术即是基于光学干涉原理。20世纪60年代激光的发明,将光学测量推向了一个更精密的境界。在迈克尔逊干涉仪基础上改进的激光干涉仪,目前达到了约10-22空间应变的探测灵敏度(在4千米距离应变约为万分之一质子尺寸),成功实现了对引力波的探测。作为人类历史上迄今最精密的测量装置,激光干涉引力波天文台(LIGO: Laser Interferometer Gravitational-Wave Observatory)于2017年被授予诺贝尔物理学奖。
LIGO对引力波的探测结果,证实了爱因斯坦广义相对论的重要预言,使得以引力波探测为基础的引力波天文学蓬勃兴起,并拓展了多信使天文学的维度。这是光学技术对人类文明新的重要贡献。目前,世界上已有多个国家在积极开展激光干涉引力波探测器的建设,这些二代、三代探测器的设计灵敏度更高,探测的引力波频率范围趋于差异化。我国目前也正在积极筹备空间引力波探测计划,迫切需要解决的技术问题除控制、动力等系统外,还包括激光干涉、相位测量、望远镜等关键的光学系统。
因此,在光电检测、传感以及激光技术等相关课程中讲解LIGO的原理和实现技术,不仅可以提供相关基础知识的应用场景,提高学生对光学干涉、激光器、稳频、增透等光学原理与技术进行综合应用的能力,而且能直接将他们带入学科前沿,激发其学习热情,坚定学生未来投身光学技术研究的决心。
然而,LIGO作为超大型、高精度的光学仪器,其干涉臂长达到4km,相对测量不确定度优于10-21,是人类至今为止制造出的最精密的干涉系统。要达到如此高的设计灵敏度,各组成部分的性能指标相当苛刻,光学部件的设计、制造、装配调节等工作不仅需要耗费大量的经费和时间,对参与人员的光学知识和技能要求也极高。同时,需要分析和补偿的误差因素较多且相互耦合关系复杂,难以通过实际的实验系统实现。
自学校、教育部启动虚拟仿真教学实验中心建设以来,通过虚拟仿真讲解实验系统的结构,原理,操作等等,已被证明为一种极佳的科普和教学的方法,表现出很好的演示和说明效果。但是目前尚未看到可以进行互动的LIGO虚拟仿真教学实验。市场上有部分教学实验仪器厂商目前推出所谓的LIGO教学实验系统,均是以常规的迈克尔逊干涉仪模拟干涉臂长的变化来观测干涉信号,不仅远远达不到LIGO的空间应变灵敏度,也实现不了光学精密测量技术的教学目标。最重要的是,无法真是烦反映LIGO干涉系统的技术难点、误差分析以及指标先进性。
因此本项目从原理和技术的底层出发,提出通过光路仿真算法,结合虚拟现实技术来实现LIGO的结构,实现光路的虚拟调节和信号探测,在这个实验中,将通过视觉建模和科学建模,仿真光源、探测器参数的控制调整,以及对激光干涉仪光路的调节,模拟实现LIGO对引力波的探测,让参与者通过虚拟现实技术观察LIGO的结构,理解其设计、建造中的关键因素,学习掌握相关的光学原理和调节技能。以避免昂贵的硬件投资和庞大的科研队伍,即可以在较短的时间内建立起一套虚拟的LIGO的系统,用于实验教学、科普和科研人员培训。通过本虚拟试验,提高学生对干涉测量技术以及LIGO工作机制的理解,吸引更多的学生进入光学技术领域,提升他们的光学综合技能,同时也让更多的公众了解LIGO,助力我国的空间引力波探测项目。
实验教学目标(实验后应该达到的知识、能力水平)
1了解激光干涉引力波天文台(LIGO)装置的基本原理
2了解迈克尔逊激光干涉的基本原理
3掌握干涉测量的主要误差因素
4了解提高测量灵敏度的方法
5掌握激光稳频技术与测量误差补偿技术
(1)实验原理(限1000字以内)
激光干涉引力波天文台(the Laser Interferometer Gravitational-Wave Observatory, LIGO)装置进行引力波探测的基本原理是比较光在其相互垂直的两臂中度越时所用的时间。当引力波在垂直于激光干涉仪所在的平面入射时,由于特殊的偏振特性,它会以四极矩的形式使空间畸变,也即会以引力波的频率,在一个方向上把空间拉伸,同时在与之垂直的方向上把空间压缩,反之亦然。引力波使两束光的光程差发生改变,根据探测到的干涉强度变化即可探测引力波。激光干涉仪引力波探测器就是在迈克尔逊干涉仪的基础上,加入了分光镜、法布里-玻罗腔、功率循环镜和其他部件。其基本光学结构如下图:
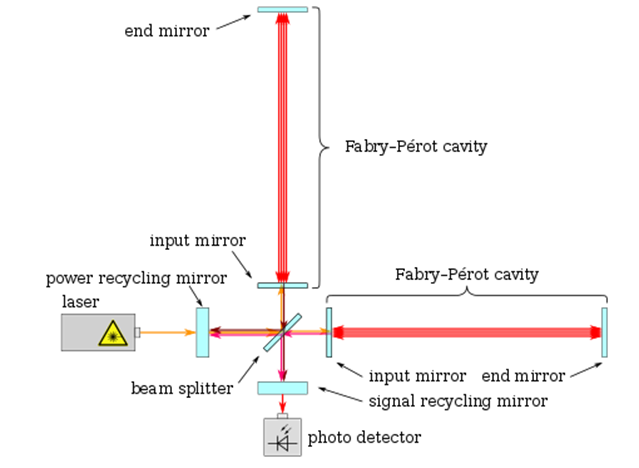
对输入光束进行相位调制,然后在功率循环腔中建立共振。相位调制边带只在功率循环腔中共振,底部光电探测器上的光入射时携带了引力波信号。引力波引起的相位变化与迈克尔逊干涉仪臂长成正比,该干涉仪实际臂长为4km。为了进一步增加臂的长度,使用法布里-玻罗腔,腔体由前后两面镜子组成,若外部输入波长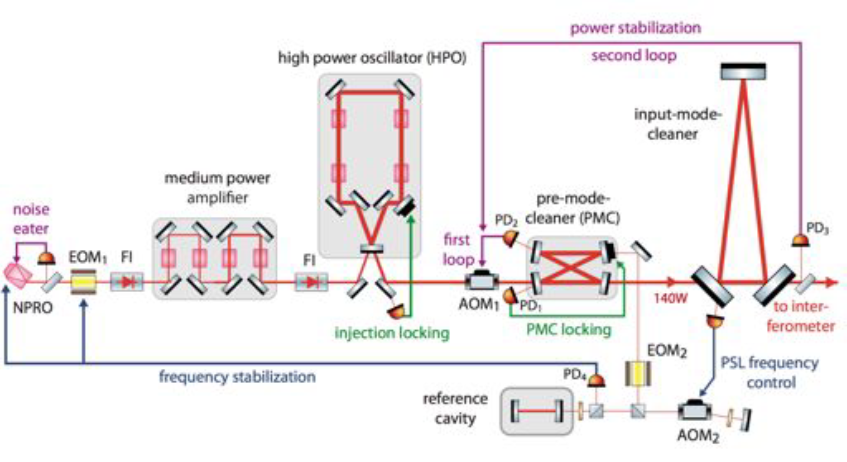 和腔长L满足=2L/n(n是任意正整数),入射的激光束在腔内多次来回反射,发生正共振,光在里面来回往返400次,此时腔内积累的光功率达到最高。在激光器和分光镜之间放上一面功率循环镜,可以把干涉仪亮口处的光重新收集起来,再注入干涉仪中,进行循环利用。
和腔长L满足=2L/n(n是任意正整数),入射的激光束在腔内多次来回反射,发生正共振,光在里面来回往返400次,此时腔内积累的光功率达到最高。在激光器和分光镜之间放上一面功率循环镜,可以把干涉仪亮口处的光重新收集起来,再注入干涉仪中,进行循环利用。
LIGO对系统中的光学镜片都有十分苛刻的要求。分光镜要把入射光分成强度严格相等的两束。法布里-玻罗所用的四面镜子(迈克尔逊干涉仪的臂)必须具有相同的光学特性:透过率、表面质量和反射损耗。在LIGO中,为了在整个表面上提供均匀的光学特性,镀膜厚度要均匀,且材料导热性能要好。光学元件面型精度要求PV值小于/100,RMS值小于/1000,曲率半径大于6 km,且半径误差的测量误差小于3%。
其他的关键元件有清模器、激光功率和频率稳定系统、光杠杆等。清模器保证激光束的横向剖面是纯净的TEM00(基模厄米-高斯)模式,主体部分是一个具有较高透射率的行波谐振腔,常采用由三面光学镜组成的锐角三角形结构。为了控制激光功率涨落的霰弹噪声,激光器的输出功率不但要大(十几瓦到两百瓦左右),还要有较高的稳定性。激光频率涨落引起的频率噪音会严重影响干涉仪灵敏度,所以要求光束具有单一的振动频率。为了对测试状态进行实时控制,需要使用光杠杆,使干涉仪稳定地保持锁定状态。
知识点集群:共7个
1. 激光干涉原理
2.激光器功率和稳频原理和控制
3.法布里-玻罗腔原理和控制
4. 功率循环技术原理和方法
5. 光学镜面型测量和镀膜方法
6. 清模器原理和方法
7. 光杠杆原理和方法
(2)核心要素仿真设计(对系统或对象的仿真模型体现的客观结构、功能及其运动规律的实验场景进行如实描述,限500字以内)
仿真场景将包括:
1 激光谐振腔
2 激光稳频系统
3 清模器
4 功率循环镜
5 光杠杆
6 法布里-玻罗腔
7 干涉探测器
8 数据显示和分析平台
稳频激光的生成与控制系统如下图所示。
![]()
![]()
![]()
![]()
![]()
A 通过调节激光器主要部分的参数,调节生成激光的频率、噪声、功率、模态等,学习稳频激光控制系统各部件的工作原理及其对生成激光性能的影响。
B 仿真两束激光在两个臂的法布里-玻罗腔内的往返传播过程,了解各元件的吸收、杂散光、表面质量以及环境干扰对干涉测量结果的影响。
C 了解高质量探测器的工作原理以及量子噪声、热漂移的抑制机理。掌握通过干涉信号解析引力波的计算过程。
对于社会公众的科普演示,参与者通过VR眼镜接入到虚拟LIGO实验环境,在虚拟实验设备上,由科普人员介绍LIGO的原理及各子系统功能;系统根据默认参数自动调整好光路,打开激光器,在探测器端演示空间应变(引力波到达)情况下干涉信号的变化;
对于高中生的简单实验操作,参与者通过VR眼镜接入到虚拟LIGO实验环境,教师讲解LIGO的原理及各子系统功能之后,学生打开激光器,调节激光器的输出功率,在探测器端观测干涉信号的信噪比,获得对量子噪声及探测灵敏度的直观认识。
对于本科生的实验教学,参与者通过VR眼镜或者电脑网页端接入到虚拟LIGO实验环境,了解LIGO的原理及各子系统功能之后,学生依据实验步骤开展实验。根据教学内容调整相应子系统的参数设置,进行局部或者整体的光路调节,通过反馈数据和图标,不断调整实现一定的科学目标。比如最基本的法布里-玻罗腔长度调整,或者激光功率和频率稳定,信噪比及灵敏度测量等。也可进行试错,体会错误操作带来的问题,让参与者更深刻的记忆和理解LIGO的原理和操作。如果中途实验失败,还可以存档,并读取存档,从错误之前开始。
虚拟实验操作时,系统根据同学的操作的合理性和操作结果及时给出反馈指导,实验结束后,根据最终结果和分步操作的成绩综合判定分数。
后续项目中,我们还将加入研究模式,由科研人员按照自己的需要插入模块或设置子系统参数、开发仿真算法。
(1)学生交互性操作步骤,共步
步骤序号 |
步骤目标要求 |
步骤合理用时 |
目标达成度赋分模型 |
步骤满分 |
成绩类型 |
1 |
开机 |
3分钟 |
安全,正确 |
5 |
■操作成绩 ■实验报告 £预习成绩 £教师评价报告 |
2 |
激光出束 |
3分钟 |
正确出束 |
10 |
|
3 |
频率 |
10-20分钟 |
达到功率和频率稳定 |
10 |
|
4 |
清模 |
5-10分钟 |
达到纯净基模 |
10 |
|
5 |
调节法布里-玻罗腔 |
5-10分钟 |
达到腔长参数关系 |
10 |
|
6 |
调节功率循环镜 |
5-10分钟 |
达到光重新收集 |
10 |
|
7 |
调节光杠杆 |
5-10分钟 |
干涉仪保持锁定状态 |
10 |
|
8 |
光电探测器成像 |
10-20分钟 |
捕获干涉信号 |
15 |
|
9 |
数据分析 |
30-60分钟 |
得到引力波信息 |
15 |
|
10 |
关机流程 |
3分钟 |
安全关机 |
5 |
(2)交互性步骤详细说明
以下操作和交互流程为全流程介绍,对于不同的任务等级,将做不同的省略或者自动化运行。(以下每个交互步骤实际包含至少10次以上操作)。
1打开所有机柜电源,机器电源。注意顺序。调整好所有系统的初始值。
2通过操控激光器,激光出束。
3通过操作激光功率和频率稳定系统,达到激光功率和频率稳定。
4通过操作清模器,保证激光束的横向剖面是纯净的TEM00(基模厄米-高斯)模式。
5通过调整腔长满足激光束在腔内发生正共振,多次来回反射在腔内积累光功率。
6通过调节功率循环镜,重新收集干涉仪亮口处的光并注入干涉仪中进行循环利用。
7通过调整光杠杆,使干涉仪稳定地保持锁定状态。
8光电探测器捕获干涉信号,并观察干涉信号。
9通过将得到的干涉数据导入数据分析平台,对数据进行深度处理,得到引力波相关参数信息。
10将各设备恢复到安全参数,然后按顺序关机。
注:
LIGO虚拟仿真调节的最终考核结果应当基于引力波探测的灵敏度,而其灵敏度则取决于各子系统的调节质量。例如激光功率和频率的稳定性,清模器的输出模式,FP腔内光功率,探测器噪声功率等,均会影响系统的信噪比从而影响灵敏度。因此,围绕最终考核结果,我们可以设置一系列阶段性指标,如激光稳定性,模式纯净度,腔内光功率,信噪比等作为考核依据,以判断实验是否成功。
开发技术 |
√VR £AR £MR £3D仿真 £二维动画 √HTML5 £其他 |
开发工具 |
√Unity3D £3D Studio Max £Maya £ZBrush £SketchUp £Adobe Flash £Unreal Development Kit £Animate CC £Blender √Visual Studio £其他 |
服务器
CPU 32核、内存256GB、硬盘1TB、
GPU型号RTX2060以上
操作系统
√Windows Server £Linux £其他
具体版本:
数据库
√Mysql £SQL Server £Oracle
£其他
备注说明(需要其他硬件设备或服务器数量多于1台时请说明)
是否支持云渲染:√是 ○否

Tel:021-31242554
Email:zxchao@fudan.edu.cn
研究方向:精密光学测量技术 (Precision optical measurement) 包括光学干涉测量技术、数字全息显微术、偏折术等;计算成像 (Computational imaging) 包括超分辨显微技术、压缩感知与去噪、深度学习等;复杂表面评定表征 (Metrology of complex surfaces) 包括自由曲面与结构表面的形貌表征、多尺度分析以及标准化等
![]() 电话: (021)65642805
电话: (021)65642805![]() 邮箱: fanglei@fudan.edu.cn
邮箱: fanglei@fudan.edu.cn ![]() 地址:上海市杨浦区邯郸路220号
地址:上海市杨浦区邯郸路220号


